Automation Equipment
Automation encompasses a broad spectrum of technologies and practices that have fundamentally transformed manufacturing. By employing computer-controlled, automated, and robotic machinery, tasks like material handling, product forming, welding, milling, grinding, cleaning, assembly, and packaging are performed with precision, repeatability, and efficiency. Automation extends beyond traditional manufacturing, seamlessly integrating into systems that sort mail, package goods, inspect components, label products, and process food items at high speed. These systems may operate under human supervision, guided by production managers and operators, or autonomously, functioning independently beyond initial programming and routine maintenance. For companies comparing automated equipment, common goals include improving throughput, reducing downtime, increasing product consistency, controlling labor costs, supporting lean manufacturing, and building a safer production environment. Whether a facility is evaluating conveyor automation, robotic workcells, PLC-based control systems, or complete turnkey production lines, modern automation equipment helps manufacturers scale output while maintaining process control and dependable quality.
Automation Equipment FAQ
What industries use automation equipment?
Automation is widely used in manufacturing, food processing, glass, metal, and plastics production. It also supports tasks like material handling, welding, milling, packaging, sorting, assembly, palletizing, and inspection in facilities across the U.S. and abroad, making it valuable for both high-volume plants and specialized production operations.
How did automation change during the Industrial Age?
Automation in the Industrial Age advanced with assembly lines, automated glass-blowing machines, and sectional electric drive controls. These innovations boosted efficiency, repeatability, and consistency while laying the groundwork for later robotic systems, programmable controls, and computer-driven manufacturing methods.
What role do robotic arms play in automation?
Robotic arms handle repetitive or precision tasks in manufacturing. Since the 1960s, they have evolved to perform multi-functional movements with degrees of freedom, helping with welding, pick-and-place work, machine tending, assembly, and inspection while improving safety, uptime, and accuracy.
What are the main benefits of industrial automation?
Industrial automation enhances safety, reduces accidents, lowers production costs, and supports more consistent quality. Automated systems can run continuously without breaks, improving efficiency, minimizing waste, increasing throughput, and helping manufacturers meet demanding production schedules.
What technologies are included in modern automation systems?
Modern automation combines CAD, CAM, CNC, robotics, additive manufacturing, servo controls, sensors, HMIs, PLCs, and systems integration. These technologies enable rapid prototyping, multi-axial precision, real-time monitoring, and scalable production across industrial sectors from automotive to food processing.
How are automated systems maintained to meet standards?
Automated equipment requires regular cleaning, calibration, inspections, software checks, and preventive maintenance. Standards from OSHA, FDA, ANSI, and ASTM regulate quality and safety, while CGMP guidelines help manufacturers maintain compliance in sensitive industries like pharmaceuticals and food processing.
What is a dark factory in automation?
A dark factory is a fully automated facility designed to operate with little or no direct human labor. While highly efficient and cost-saving, these factories rely on electronic monitoring, predictive maintenance, and remote oversight to reduce the risk of cascading system failures.
The History of Automation
The Industrial Age marked a major shift toward automated production. Henry Ford's revolutionary assembly line in 1913 redefined manufacturing by bringing work to laborers through conveyor systems and organized stations, dramatically increasing productivity and lowering unit costs. Yet even before Ford, Ransom Olds had already demonstrated the value of assembly-based production methods in 1901, showing how standardized workflows could improve speed, reduce variation, and support larger-scale output. These early developments changed how manufacturers thought about labor, machinery, process sequencing, and production efficiency.
Advancements in automation continued with equipment such as the automated bottle-blowing machine of 1905, which reshaped glass production by reducing manual intervention and supporting more uniform output. As industrial demand expanded, innovations like sectional electric drive control in 1919 enabled steadier paper production by managing drying times and process flow with greater accuracy. In Japan, synchronized automation began taking shape in 1930 with dependable electrical timers, setting the stage for postwar improvements in electronics, controls, and factory coordination that would later help establish the country as a global leader in automated manufacturing and industrial productivity.
The 1960s ushered in robotic arms capable of simple repetitive tasks, culminating in the Stanford Arm of 1969, which introduced more advanced multi-functional movement. By the 1980s, the Computer Age accelerated progress through Computer Integrated Manufacturing (CIM), programmable logic, and Computer Numerical Control (CNC) systems. These technologies enabled rapid prototyping, tighter tolerances, better repeatability, and more precise mass production. In the 2010s, additive manufacturing expanded the automation conversation again, with 3D printing making it possible to build complex parts directly from digital models. Today, automation history continues to evolve through smart factories, machine vision, industrial networking, and data-driven process optimization.
Industrial Automation Design and Uses
Automation systems are tailored to execute specific tasks through synchronized processes. Using servo mechanisms, pneumatics, sensors, drives, and advanced computer control, these systems ensure materials are delivered, positioned, inspected, and processed with dependable timing. Conveyor systems, whether belt-driven, pneumatic, roller-based, or bucket-based, transport items through steps that may involve forming, cutting, sorting, welding, filling, labeling, vision inspection, or coating. In food processing, automated machines clean, sort, portion, package, and seal products to maintain uniform quality, improve sanitation, and support higher line speeds. In many facilities, the design process starts by asking practical questions such as: What production rate is required? What level of flexibility is needed? How much floor space is available? What materials are being handled? Those questions shape whether a manufacturer chooses standalone automation cells, modular assembly systems, or a full integrated production line.
Glass, plastic, and metal production benefit significantly from automation. Automated smelting, molding, extrusion, cutting, and finishing processes efficiently create components, while robotic welding, deburring, handling, and inspection add precision throughout assembly. These systems not only streamline production but also enhance workplace safety, reduce scrap, improve repeatability, and support tighter quality control. Buyers researching automation equipment often compare factors such as cycle time, integration requirements, maintenance demands, operator training, footprint, software compatibility, and return on investment. That is why industrial automation design is rarely one-size-fits-all; it is built around the product, the process, and the performance goals of the plant.
What Automation Means For Industry
Automation enhances safety by minimizing human exposure to hazardous environments, reducing accidents, and limiting repetitive motion injuries. Economically, automated systems lower production costs by operating continuously without breaks or shift changes, while helping companies increase throughput, manage labor shortages, and improve product consistency. Automation also gives manufacturers more dependable data, clearer visibility into bottlenecks, and better control over traceability and process documentation. However, fully automated "dark" factories, while highly efficient, can pose risks if malfunctions spread across connected systems. To reduce that exposure, electronic monitoring, alarms, remote surveillance, predictive maintenance tools, and real-time diagnostics are integrated for ongoing oversight. For many organizations, automation is not only about replacing manual effort; it is about building a more responsive, scalable, and quality-focused operation.
Automation Industry Images, Diagrams and Visual Concepts
Automation systems are an integration of sensors, controls, actuators, drives, and software designed to perform functions with minimal or no human intervention. Together, these elements support process automation, motion control, and repeatable production across many industrial environments.
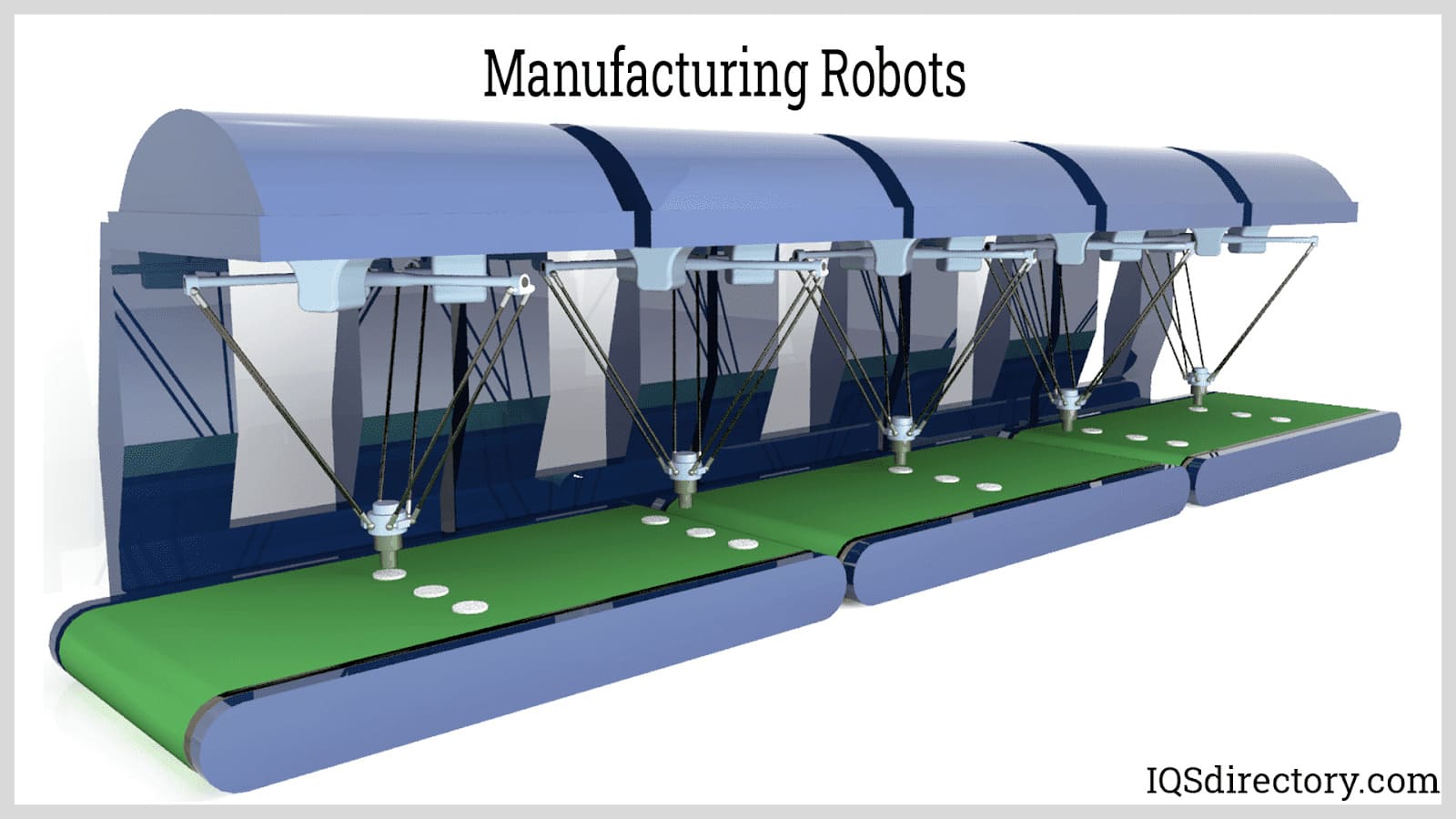
Robots do not experience fatigue, and their processing speed is often much faster than that of human operators during continuous operation. This makes industrial robots well suited for repetitive, high-volume, and precision-driven manufacturing tasks.
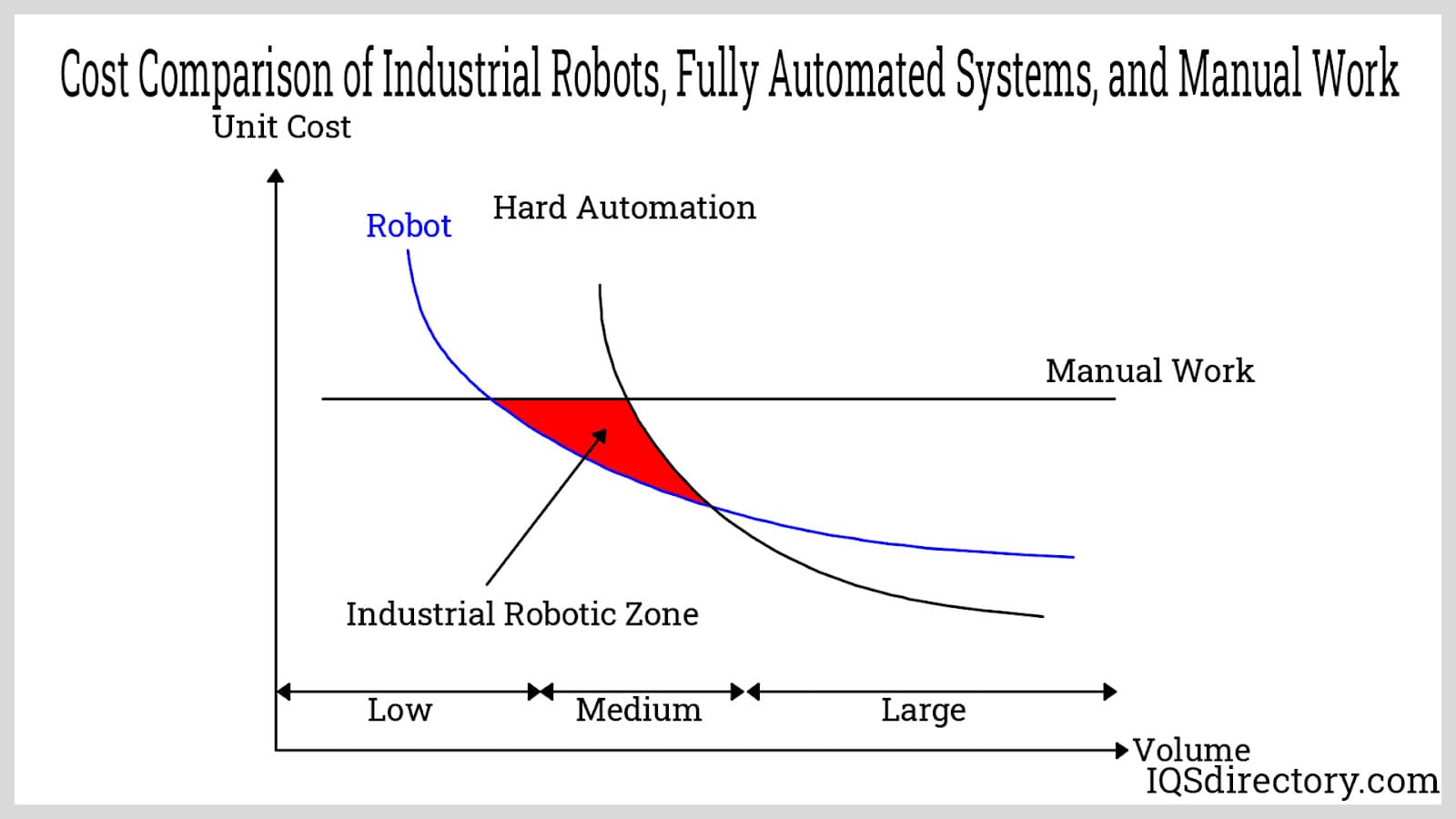
Automation can reduce raw material waste, lower labor-related operating costs, improve product quality, and increase production rate once a robotic or automated system is fully online. These advantages are often central to automation ROI evaluations.
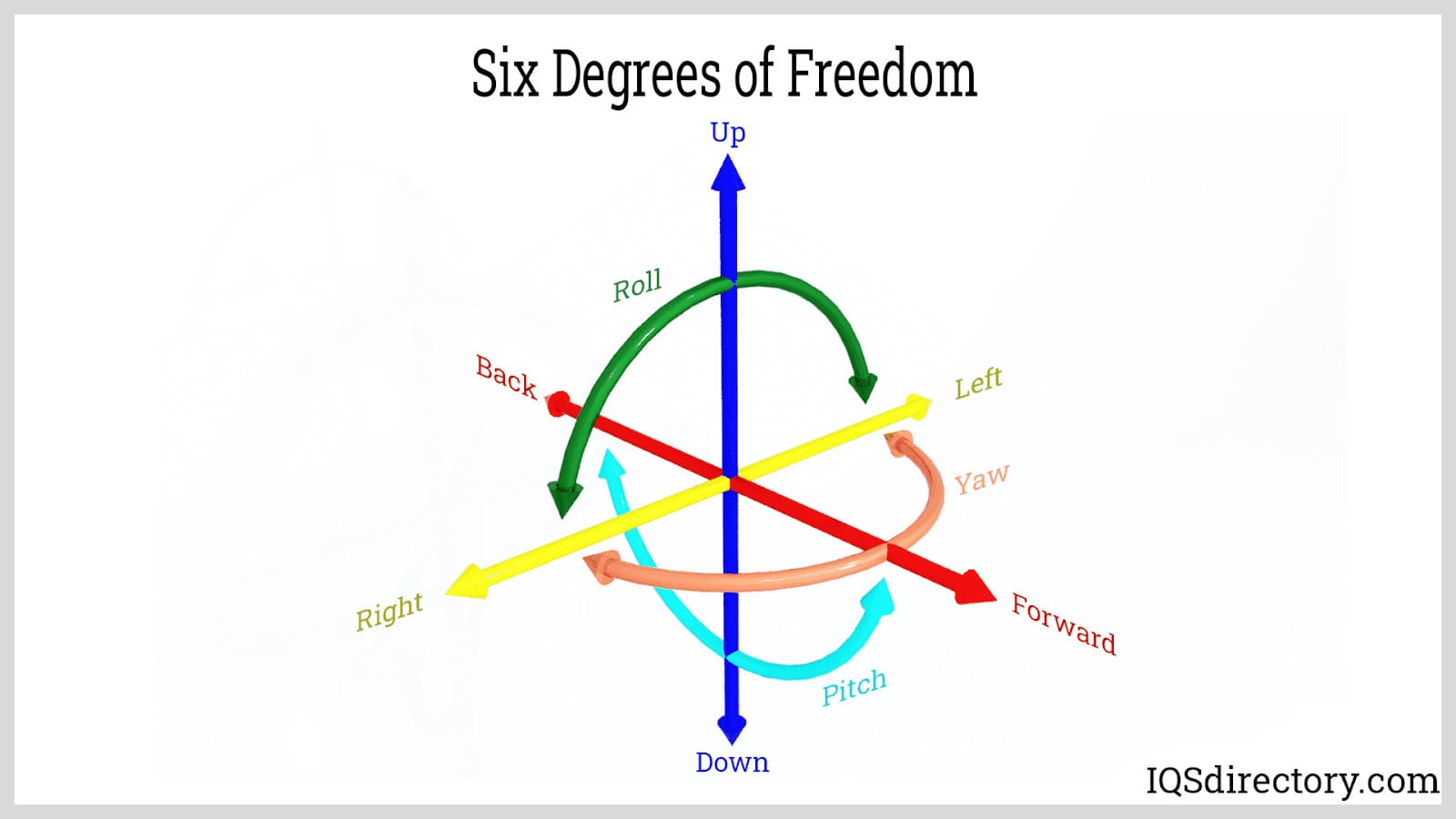
The number of axes and degrees of freedom define a robot's range of movement, flexibility, and suitability for tasks such as welding, picking, placing, packaging, and machine tending.
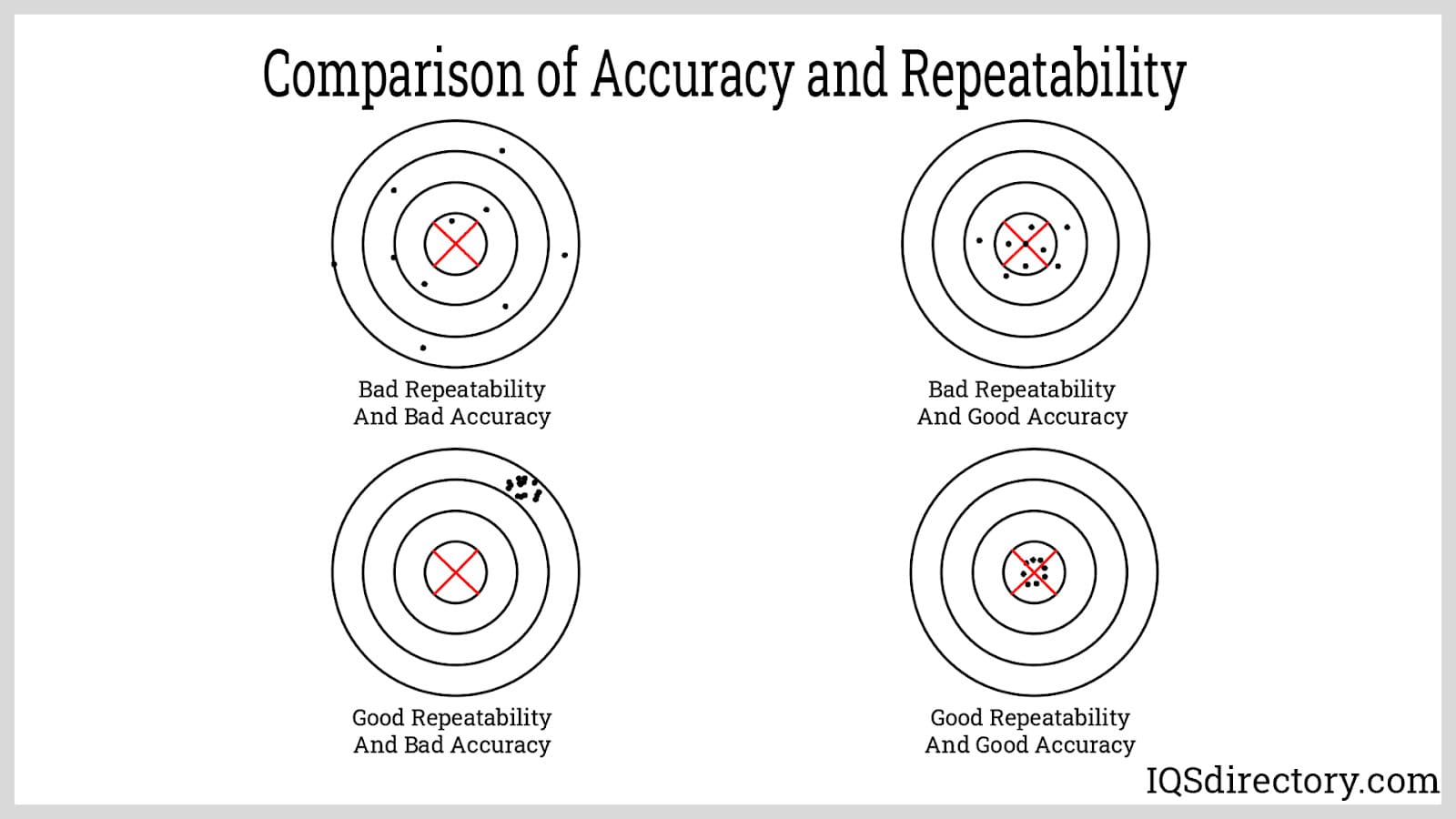
Accuracy and repeatability are two of the main characteristics used to evaluate how effectively a robot performs a task. These measures influence part quality, consistency, and overall process stability on automated lines.
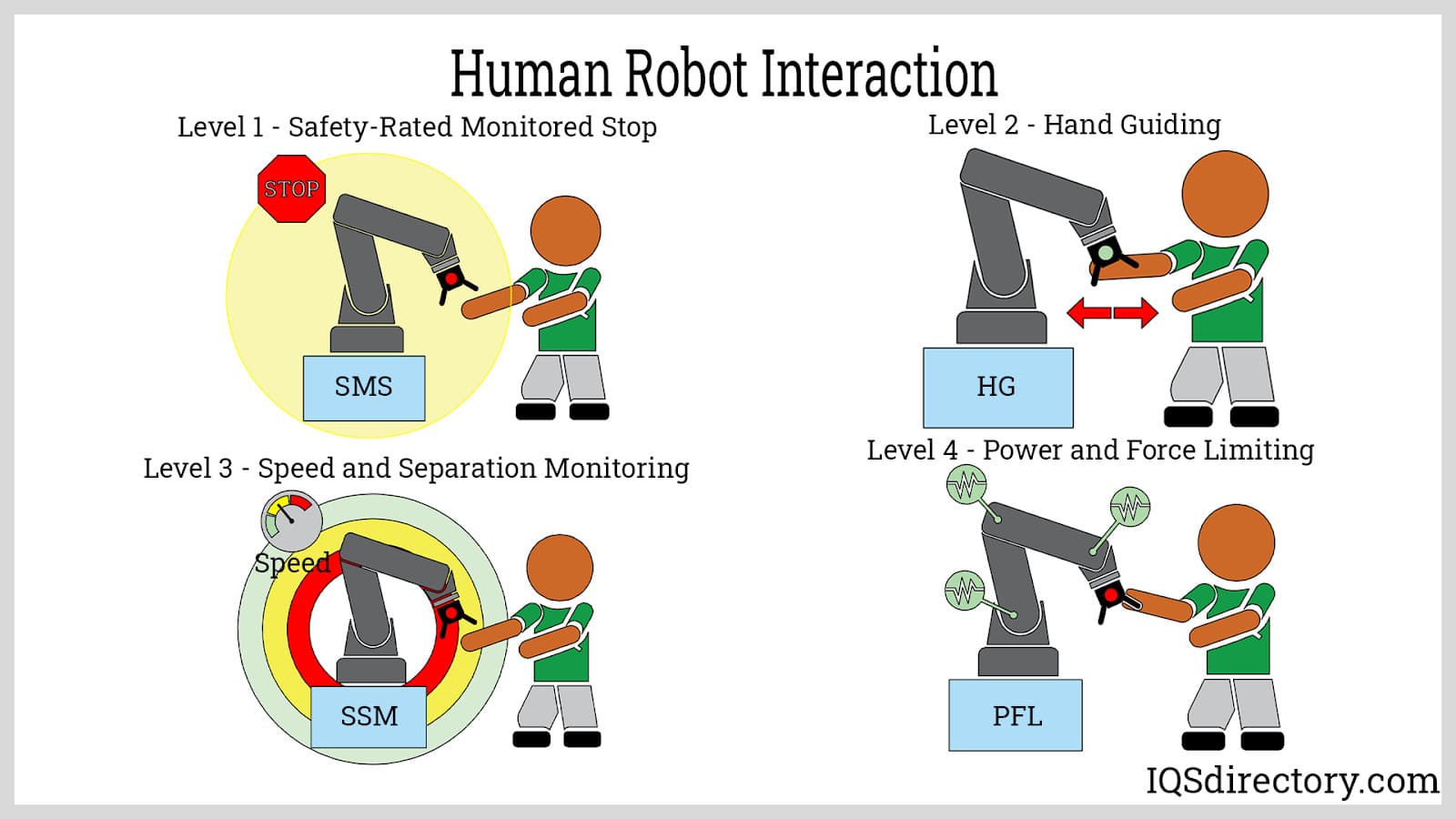
Collaborative robots are designed to work safely alongside people and may include safety features such as power limiting, monitored stops, hand guiding, and speed-and-separation functions, making them useful for flexible manufacturing cells.
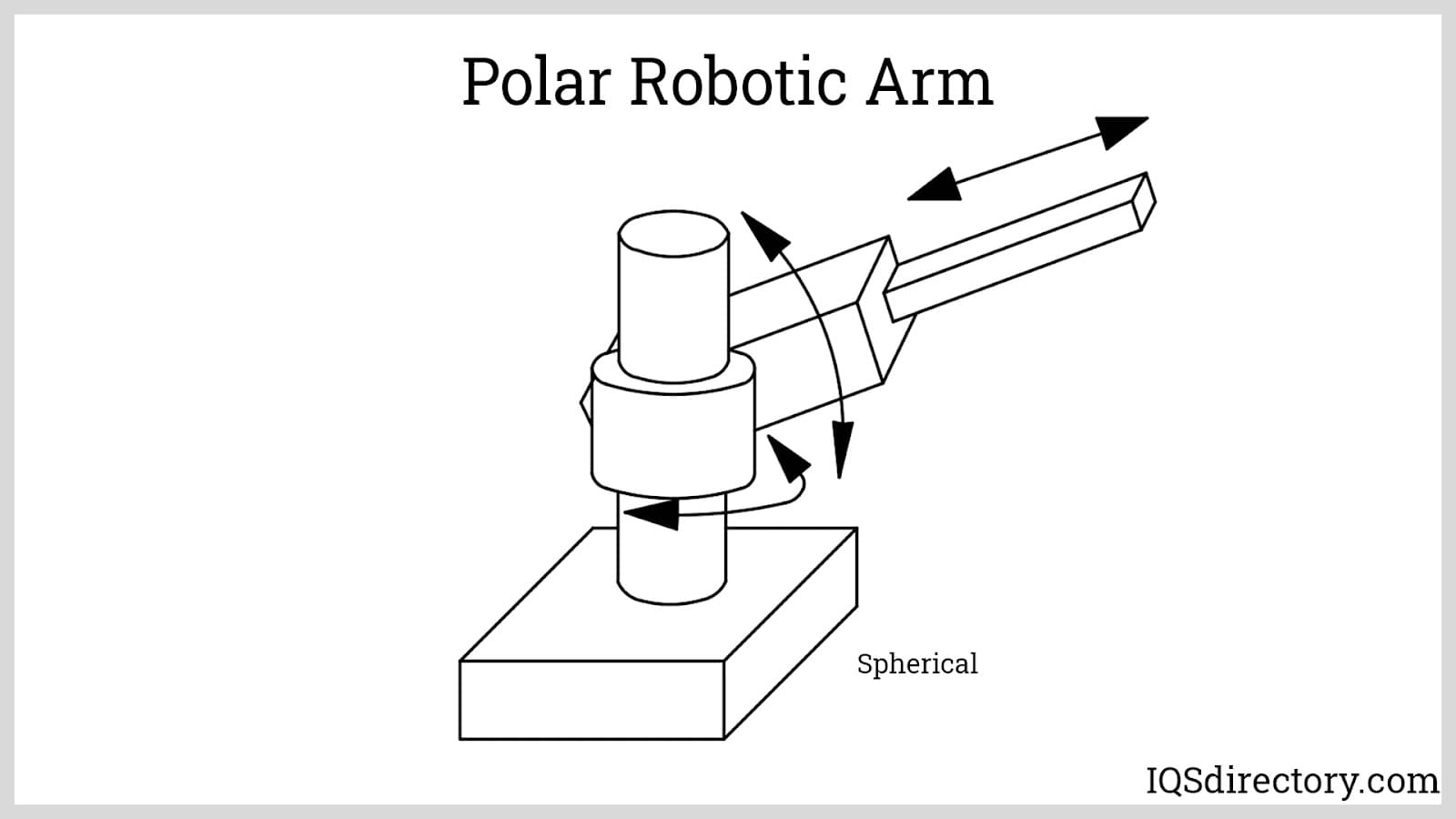
A polar robotic arm is one type of arm configuration and allows a defined range of motion depending on how its joints are arranged. Different robot geometries are selected based on reach, payload, and application needs.
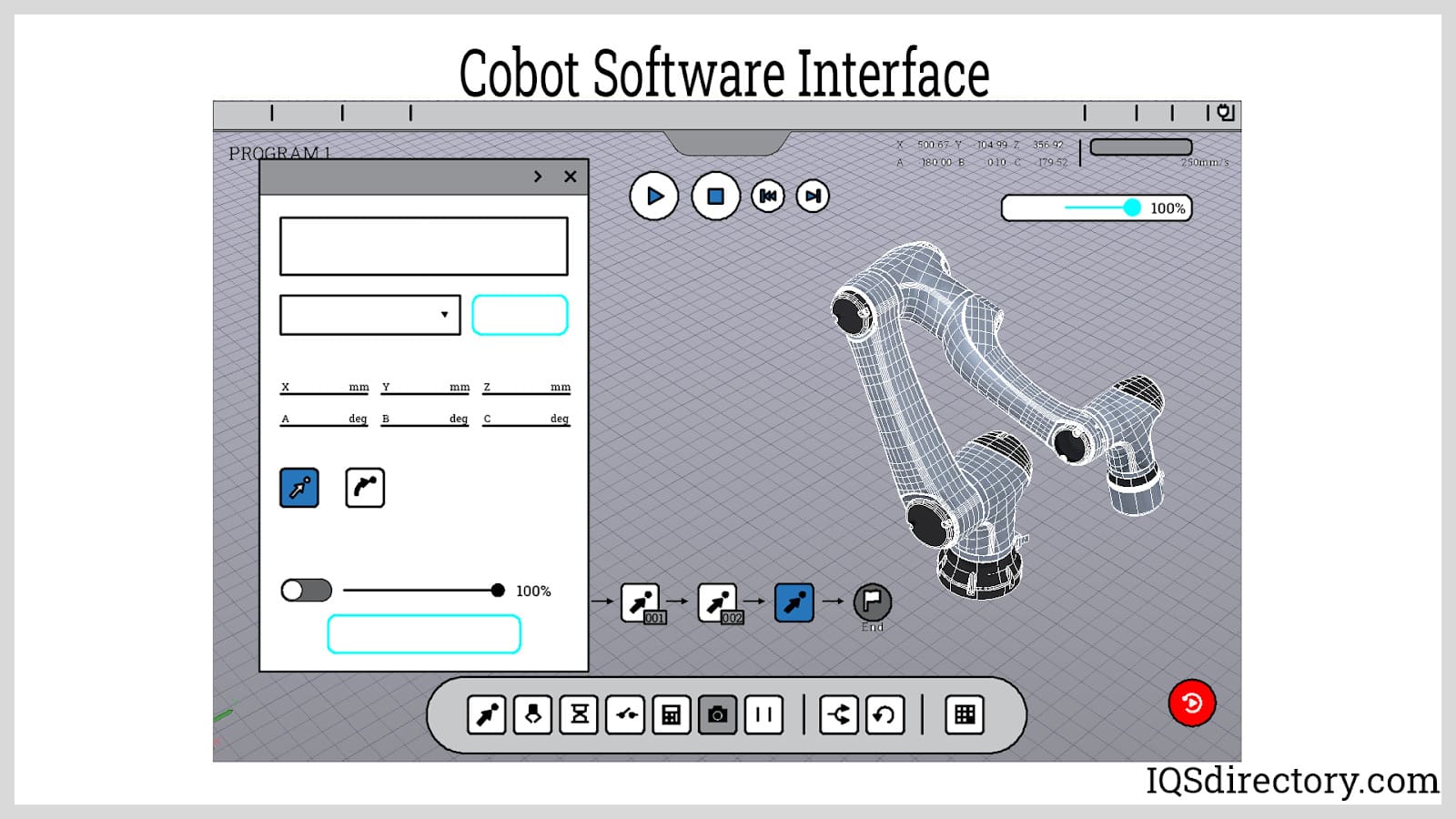
Applications are available for designing and programming collaborative robot tasks through intuitive, user-friendly software interfaces. This helps shorten setup time, simplify training, and make automation more accessible for a wider range of production teams.
Types of Automation in Industry
Modern automation employs various methodologies, including fixed automation, programmable automation, flexible automation, and digitally connected process control systems. Common technologies include:
- Computer-Aided Design (CAD): Facilitates the creation of intricate designs, assemblies, and production drawings that guide tooling, product development, prototyping, and downstream manufacturing workflows.
- Computer-Aided Manufacturing (CAM): Enables computer-controlled machining and production processes on assembly lines, improving accuracy, repeatability, setup efficiency, and part consistency.
- Additive Manufacturing (AM): Creates complex objects layer by layer from digital models, supporting rapid prototyping, low-volume production, and intricate geometries that are difficult to machine conventionally.
- Robotic Automation: Performs multi-axial tasks with precision for welding, material handling, assembly, packaging, inspection, palletizing, and other repeatable industrial operations.
These technologies, complemented by machine vision, industrial networking, rapid prototyping, HMI interfaces, data collection, and systems integration, have made manufacturing more adaptive, scalable, and responsive to changing customer requirements. Companies exploring automation often search for solutions that balance productivity, quality assurance, flexibility, and long-term operating value.
Automated Manufacturing Proper Care and Standards
Automated systems require disciplined adherence to maintenance schedules and regulatory standards to keep operations running smoothly. Regular inspections, lubrication, cleaning, calibration, replacement of wear components, and software verification help prevent breakdowns, reduce unscheduled downtime, and maintain process efficiency. Standards set by organizations such as OSHA, FDA, ANSI, and ASTM regulate safety, cleanliness, quality, and operating practices across industries, while guidelines like Current Good Manufacturing Practices (CGMP) support compliance in sectors such as pharmaceuticals, medical manufacturing, and food processing. Facilities that invest in preventive maintenance and documentation often see better equipment life, improved reliability, and more stable production performance.
Other Automation Equipment Types
Machine automation refers to the computer-operated machines used in an assembly line, production cell, or process environment to complete repeated tasks with reduced manual input and more consistent output.
Manufacturing automation refers to the computer-operated equipment and machines found in a manufacturing setting, including conveyors, robotic systems, sensors, controls, packaging machinery, and integrated production lines.
Automation Equipment Terms
Actuator
A device used in closed-loop control systems that translates a control signal from the final control element into physical motion or action by the controlled device.
Adjustable Speed
The ability to vary a motor's speed manually or automatically so the desired operating speed remains steady regardless of changing load conditions.
Assembler
A software tool that converts assembly language instructions into machine-readable code for execution by a processor or control system.
Automation
The implementation of systems, processes, or equipment that automatically operate and control functions while reducing or eliminating the need for direct human intervention.
Automated Storage & Retrieval System
A controlled arrangement of systems designed to automatically place and retrieve loads from specified storage locations with greater speed, organization, and inventory accuracy.
Axis
Any part of a machine or automated system that moves and requires controlled motion. Coordinated multi-axis systems combine several axes for more complex industrial tasks.
Bill of Material
A detailed list of all subassemblies, components, purchased parts, and raw materials that make up a parent assembly or finished product.
CAD (Computer-Aided Design)
Also known as CADD, this digital design system can be integrated with CAM and other engineering tools to improve product development and manufacturing workflows.
CAM (Computer-Aided Manufacturing)
The application of computer technology to generate data that controls a portion or the entirety of the manufacturing process, from machining paths to automated production steps.
Calibration
The process of verifying and adjusting the accuracy of a measuring instrument, sensor, or control device so it operates within the required tolerance range.
CIM (Computer-Integrated Manufacturing)
The integration of computer systems into multiple aspects of manufacturing so design, planning, production, and control functions work together more efficiently.
Conveyor Belt
A continuously moving belt used to transport objects, products, or materials along an assembly process or through a production line.
Dark Factory
A fully automated plant floor designed to operate without direct human labor for extended periods.
FMC (Flexible Machine Centre)
An automated system typically made up of CNC machines and robotic handling systems that load, unload, and move parts through the manufacturing process.
JIT (Just-in-Time)
A manufacturing strategy in which each operation is carefully synchronized with the next so waste is reduced and efficiency is improved.
Load Cell
A transducer that measures force or weight, often using strain gauges mounted on a force beam, and sends that data to a control or monitoring system.
Network
A connected system of computers, controllers, machines, and peripherals that allows communication, data exchange, monitoring, and coordination across automated operations.
Proximity Switch
A contactless sensor that detects the presence or absence of an object and triggers a circuit response for control, positioning, or safety purposes.
RP (Rapid Prototyping)
A phase in system or assembly design where small-scale prototypes are created to test features, layouts, and performance through sketches, CAD models, low-fidelity builds, or other fast development methods.
Robotics
The design, study, programming, and application of robots, especially for manufacturing, material handling, inspection, assembly, and related industrial processes.
Sensor
A device designed to measure motion, force, torque, position, temperature, pressure, or other variables and provide feedback for monitoring and control.
Systems Integration
The coordination of multiple automation functions, machines, controls, and data systems within a single production environment to achieve a unified operating goal.
More Automation Equipment Information